


")

")
Isole robotizzate
Gli impianti di asservimento di macchine transfer o centri di lavoro prevedono tipicamente:
- Alimentazione pezzi mediante nastri di visione
- Eventuali stazioni di riappoggio / ribaltamento
- Carico in macchina
- Scarico da macchina
- Lavaggio
- Soffiaggio
- Evacuazione pezzi finiti
Il sistema di alimentazione può anche prevedere l'utilizzo diretto di cassoni o pallet da cui prelevare i particolari anche con sistemi di visione 3D.
Lo scarico dei pezzi finiti può prevedere un sistema di pallettizzazione sia in cassetta che direttamente su pallet.
Esempio 1: Asservimento singolo centro di lavoro
Layout complessivo
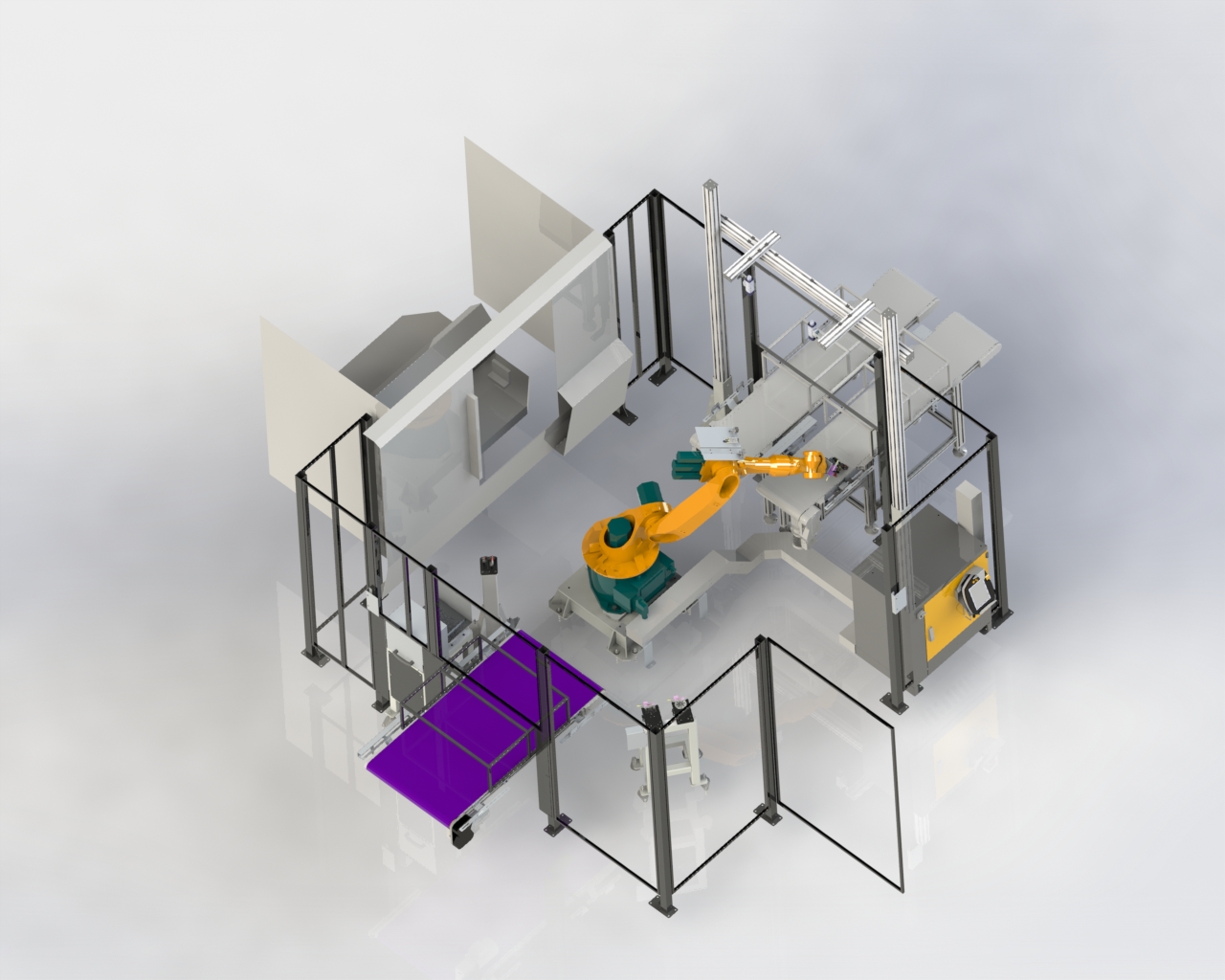
Nastro di carico con tunnel di sicurezza

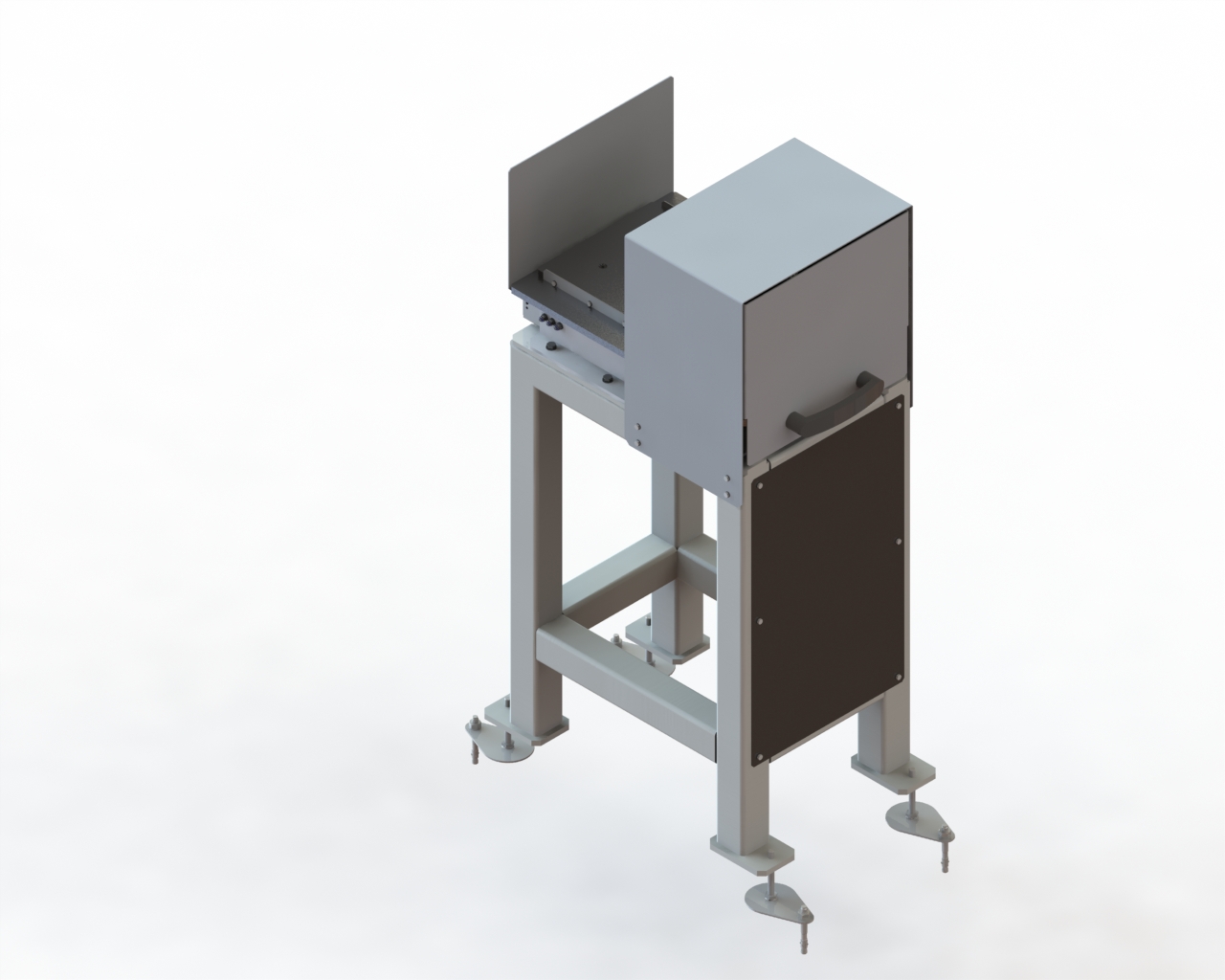
Cassetto controllo qualità
Stazione riappoggio pezzi

Stazione cambio pinze
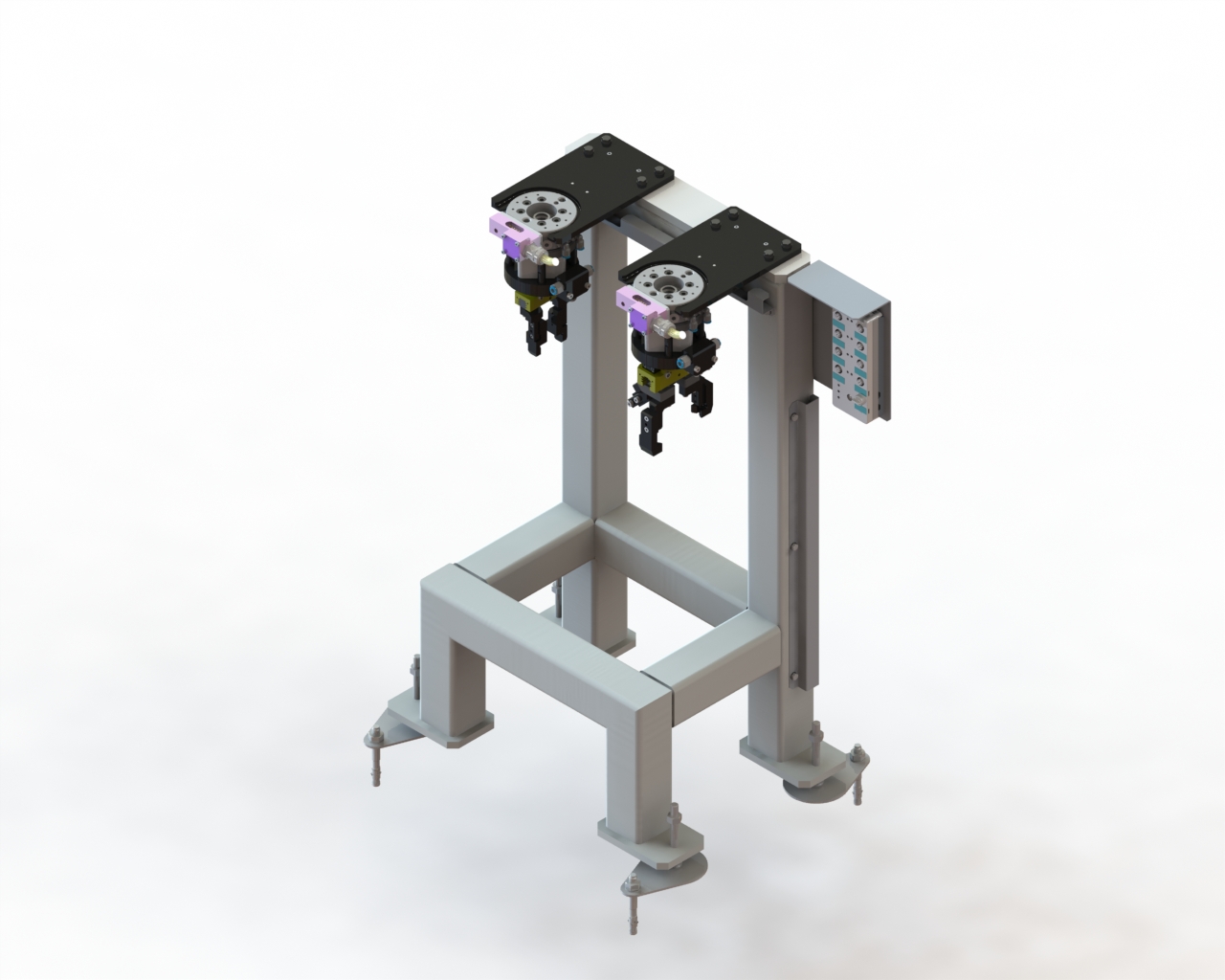
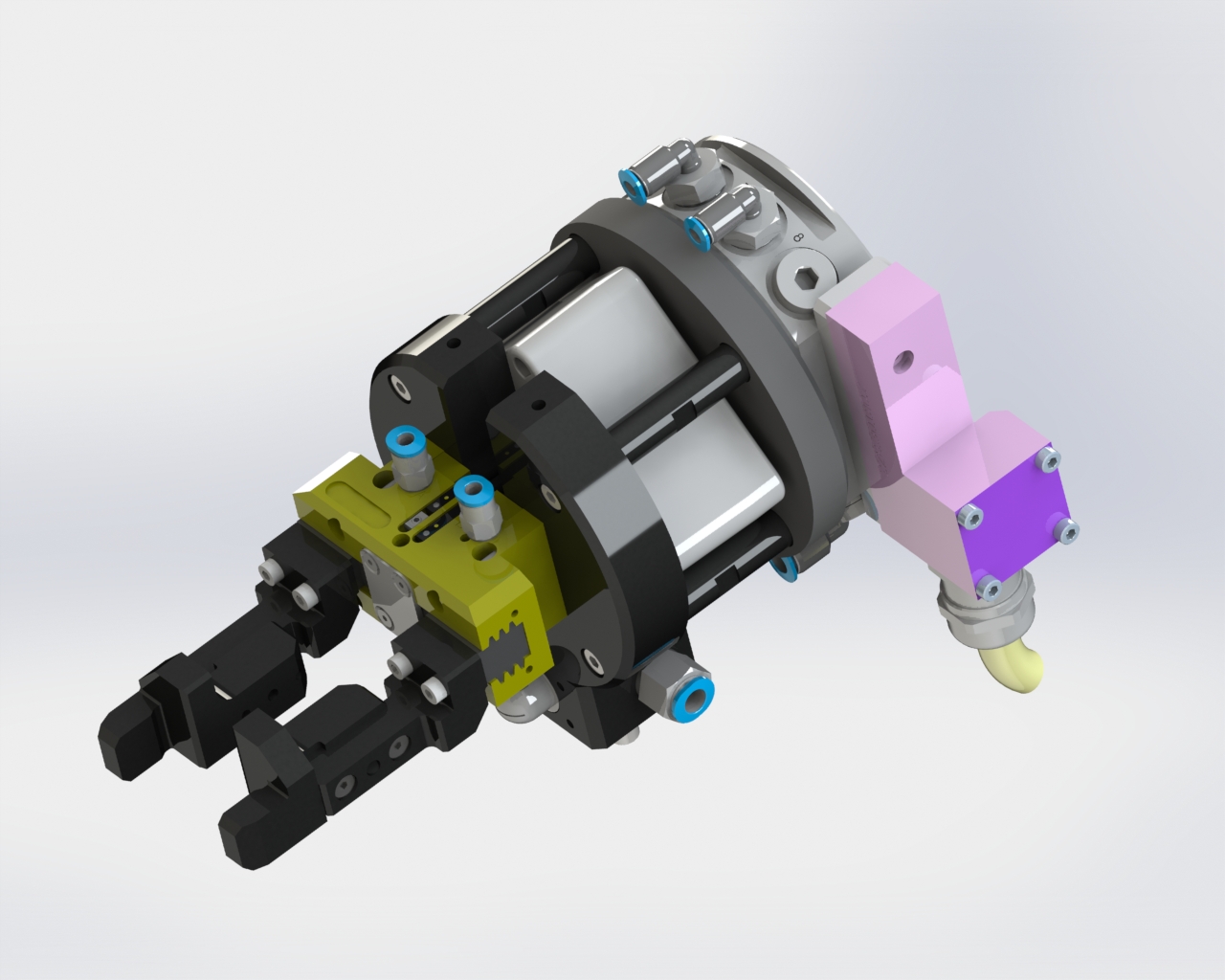
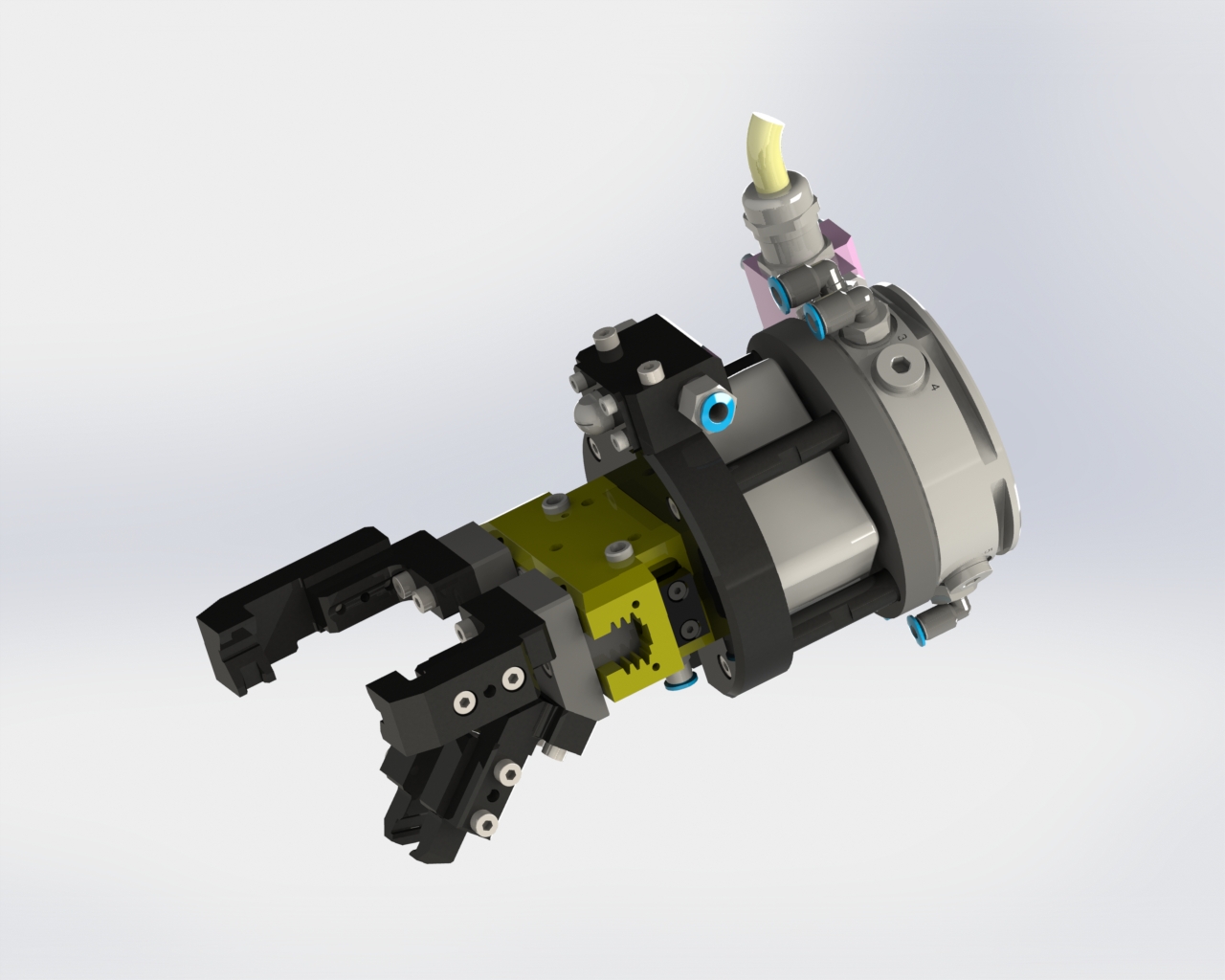
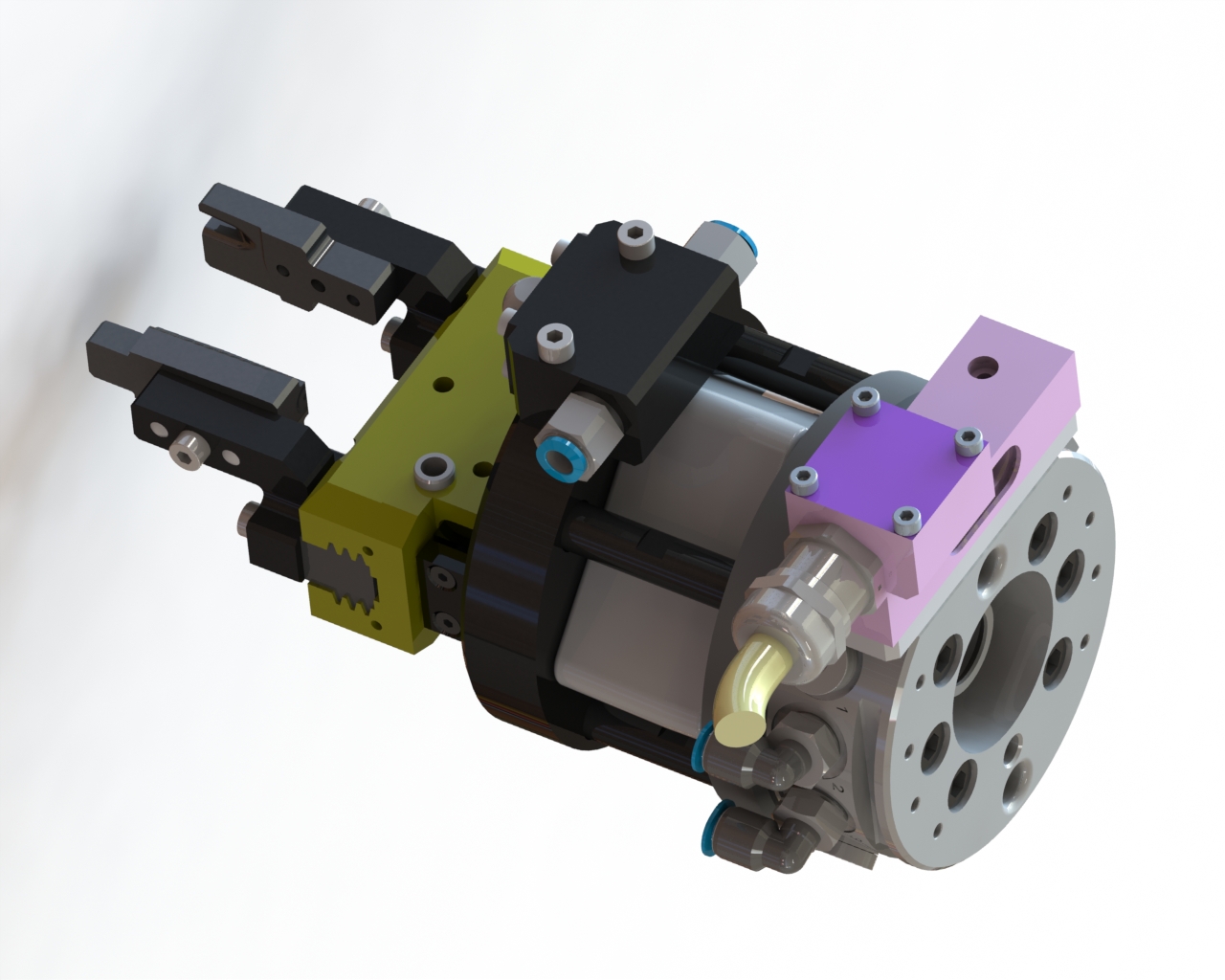
Pinze di manipolazione
|
Pinza carico e scarico pezzo 1
|
Pinza carico e scarico pezzo 2 con doppia presa
|
Pinza carico e scarico pezzo 3 con singola chela con doppia impronta |
Esempio 2: Asservimento doppio centro di lavoro
Pinze di manipolazione pezzi
|
Pinza prelievo e deposito da nastro
|
Pinza carico e scarico macchine
|
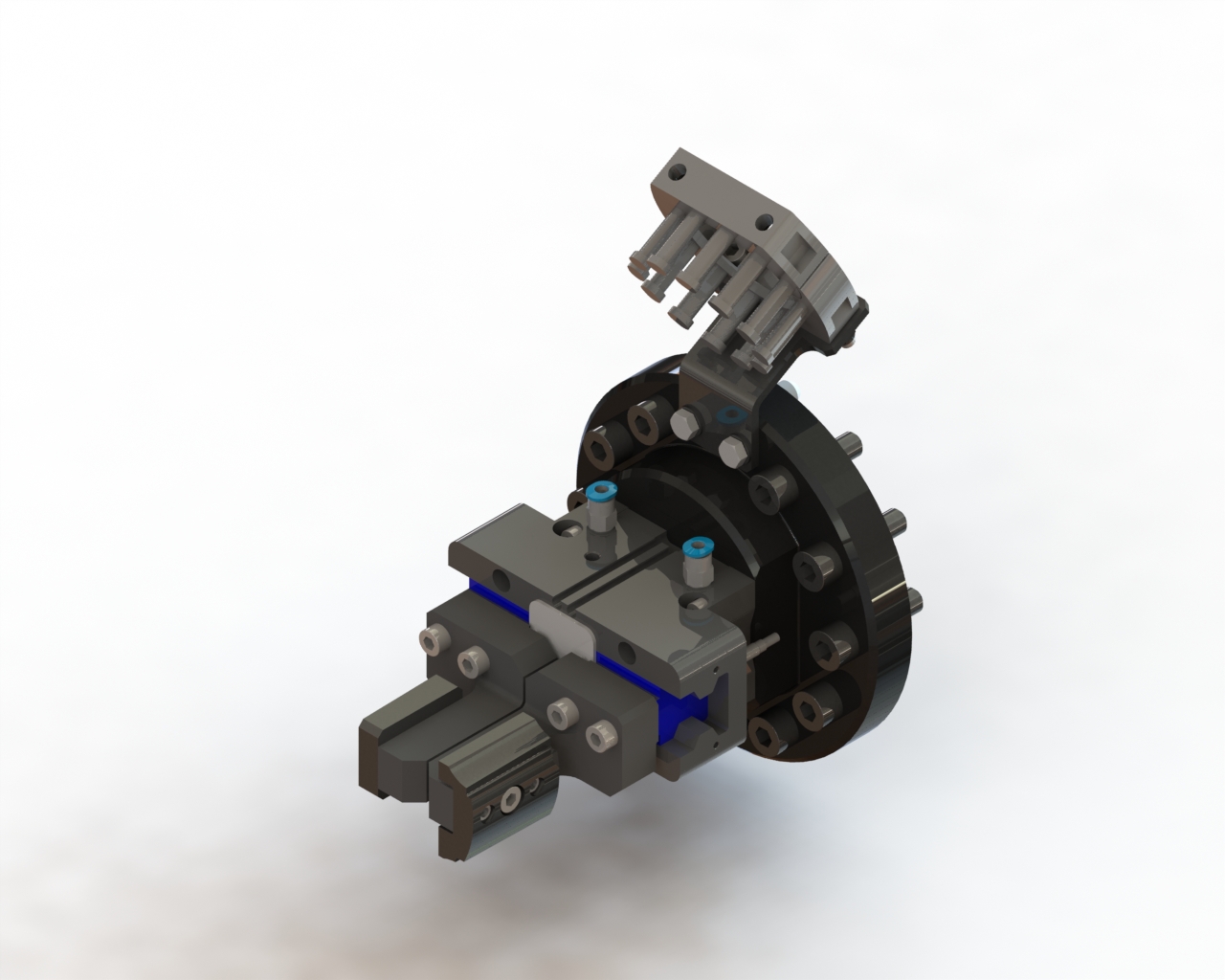

Tavola rotante di carico
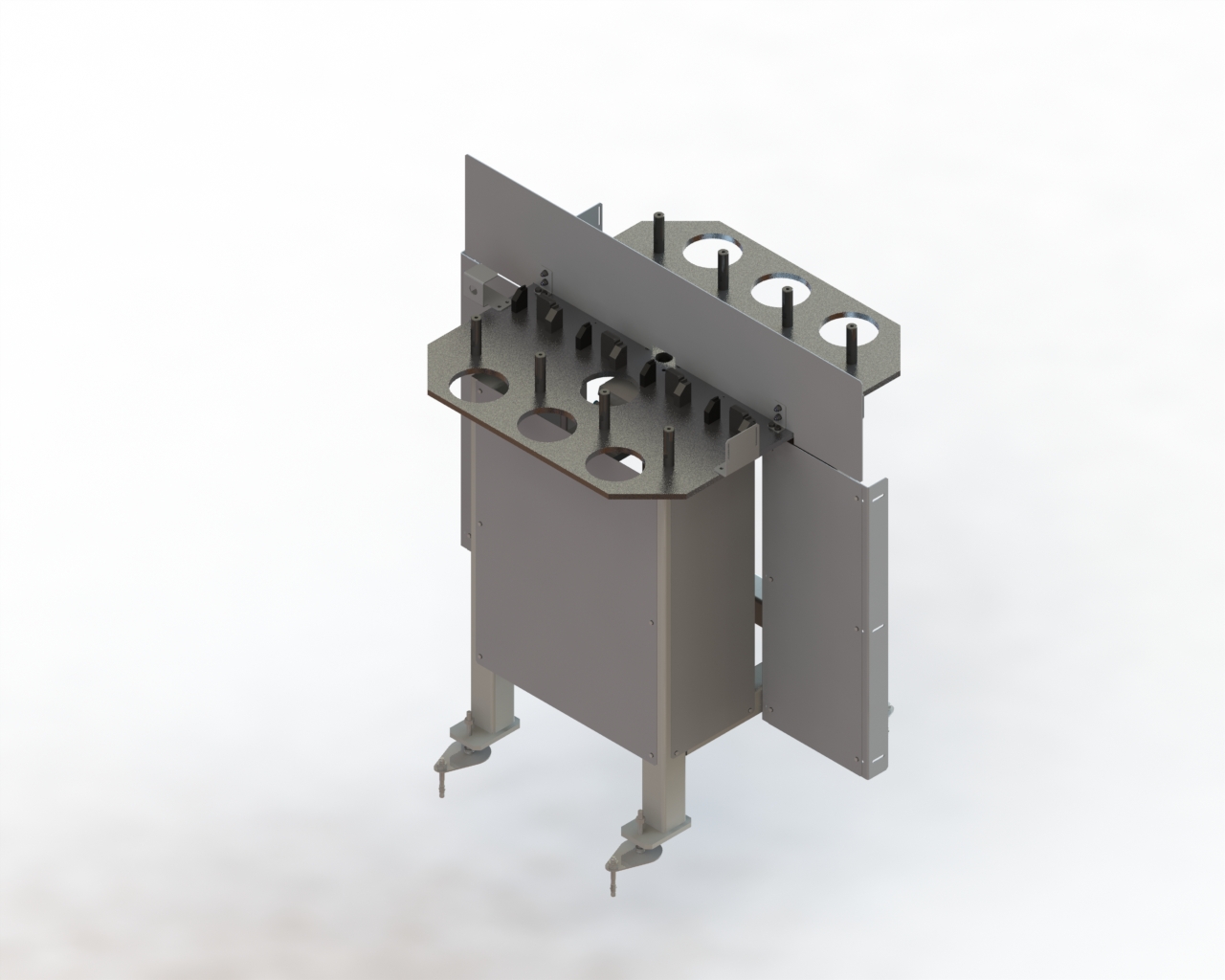
Tavola rotante di scarico

Stazione di soffiaggio
Stazione di sbavatura

Nastro trasportatore in acciaio

Nastro trasportatore in alluminio

Nastro retroilluminato

Il sistema di pallettizzazione permette una flessibilità nella definizione di schemi di pallettizzazione, personalizzabili dall'operatore anche offline. Mediante il software di supervisione della linea è possibile controllare lo stato delle posizioni di pallettizzazione con la segnalazione di stato:
- Vuoto
- Quasi pieno
- Pieno
Con i valori configura dei vari livelli configurabili a piacimento dall'operatore / manutentore.
Esistono due tipi di pallettizzazione:
- Pallettizzazione pezzi in cassette
- Pallettizzazione cassette su pallet
Pallettizzazione pezzi in cassette
Il sistema di alimentazione di questi impianti è tipicamente un insieme di riappoggi da cui il robot preleva i particolari e li deposita nella cassetta, in posizioni definite dal sistema di supervisione. Il sistema di appoggi può essere sostituito con un nastro a posizioni fisse o variabili con la garanzia di presa pezzi mediante un sistema di visione.
Il sistema di alimentazione dei contenitori è variabile da impianto ad impianto.
Pallettizzazione di cassette su pallet
Tipicamente il sistema di alimentazione delle cassette è una rulliera, da cui le cassette vengono prelevate e depositate su pallet, sempre con schemi di pallettizzazione personalizzabili e definibili anche dell'operatore / manutentore.
E' possibile dotare l'impianto di sistemi di visione al fine di prelevare le cassette senza dover applicare sistemi di bloccaggio sulla rulliera, inoltre il sistema di visione è in grado di verificare lo stato dei pallet per una corretta oggettivazione dello stato attuale in seguito a ingresso operatore nell'isola.
Impianto di pallettizzazione fine linea transfer

Impianto di spazzolatura, marcatura e pallettizzazione di particolari pressofusi

Pinza di manipolazione

L'applicazione permette di l'eliminazione di residui di lavorazione di svariati processi tipo:
- stampaggio
- pressofusione
- fusione
- taglio
- lavorazioni meccaniche
Le bave risultanti da questi processi di lavorazione vengono rimosse mediante isole automatiche di sbavatura composte da:
- sistema di alimentazione
- riconoscimento pezzo
- presa
- unità dedicate alle svariate tipologie di bave
- sistema di evacuazione pezzi finiti
Nel caso siano presenti parti ingombranti, come attacchi di colata, si predispone l'impianto con nastri di evacuazione per garantire la pulizia dell'impianto stesso.
Automatizziamo macchine di assemblaggio di vari particolari da componenti plastici a particolari metallici con tempi ciclo inferiori a 2 sec.
Il sistema di alimentazione delle parti da assemblare è tipocamente composto da un ribaltacassoni con nastri di trasporto pezzi verso il robot che caricherà il particolare in macchina.
SEDE LEGALE E OPERATIVA
Via dei Mulini, 156
25039 TRAVAGLIATO (BS)
Italy
P.Iva e C.F. 03743080982
CODICE DESTINATARIO SDI : T04ZHR3
CONTATTI
PARTNER:
